WSL通过Docker安装RKNN-Toolkit2环境
环境
我的环境是Windows下安装的WSL,系统内Ubuntu22.04。
1. 安装WSL Ubuntu22.04
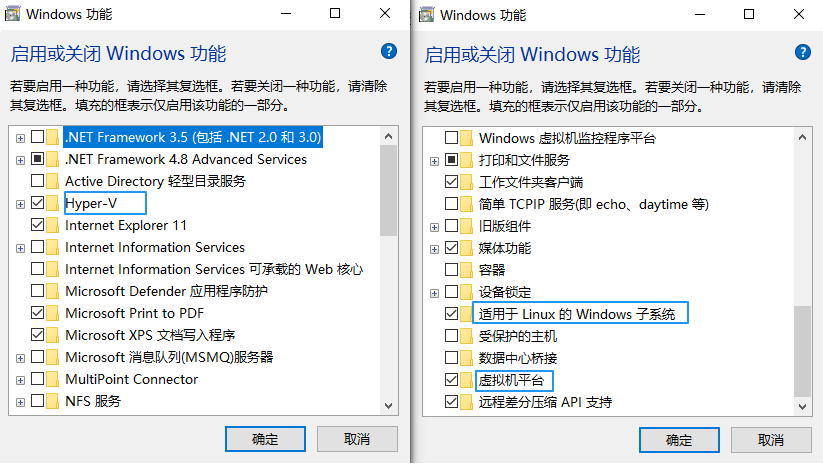
1.1 启用或关闭Windows的功能,特别是要挂在到D盘下。
1.2 安装WSL,
Microsoft AppStore 搜索 Ubuntu 22.04, 点击安装;
等待安装;
启动WSL,若启动异常,查看Ubuntu 22.04 的评论区。应是需更新wsl,wsl --update。
2.安装Docker
2.1 更换 apt 源为清华源。
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
sudo nano /etc/apt/sources.list
注释或Ctrl+K 删除原来的官方源头。
Ubuntu22.04 代号 jammy,修改 sources.list 内容为:
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-updates main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-security main restricted universe multiverse
3.Docker的简单使用
#查看docker版本
docker --vesion
#查看docker已安装的镜像images
docker images
##打印镜像列表
REPOSITORY TAG IMAGE ID CREATED SIZE
rknn-toolkit2 2.2.0-cp38 d371fba025c2 7 weeks ago 3.31GB
hello-world latest d2c94e258dcb 18 months ago 13.3kB
#进入docker的某一个镜像,启用交互终端进入容器的 shell。
docker run -it rknn-toolkit2:2.2.0-cp38 /bin/bash
#以映射wsl的地址到docker内的方式,启用交互终端进入容器的 shell。
docker run -it -v /mnt/d/3588:/mnt/3588 rknn-toolkit2:2.2.0-cp38 /bin/bash
#安装好的python环境容器持久化,将e95容器生成镜像rknn3588:dev
docker commit e95 rknn3588:dev
docker commit c46 rknn3588:used1107
#以映射wsl地址的方式进入rknn3588:dev镜像,启用交互终端进入容器的 shell。
docker run -it -v /mnt/d/3588:/mnt/3588 rknn3588:dev /bin/bash
#docker内开启代理
root@ce60fd27a002:/mnt/3588/yolov5_export/yolov5_export# export https_proxy=http://10.16.168.39:10809
#显示docker所有镜像
docker image list
#显示docker运行的容器
docker ps -a
#进入docker正在运行的容器
docker exec -it 容器id前三位数字 /bin/bash
#启动关闭的容器
docker start 容器id前三位数字
4.pip的简单使用
#查询pip的配置项
pip config list
#更换pip源头
pip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simple
5.rknn的转换模型与测试
#python 转换脚本 docker内 roadlight到onnx的模型
python export.py --rknpu --weight roadlight.pt
#python 转换脚本3588板子 onnx到rknn的模型
python -m rknn.api.rknn_convert -t rk3588 -i ./model_config.yml -o ./
#python 测试图片
python test.py --img roadlight.jpg
#python 测试视频、图片文件夹
python detect.py --weights vestAndHelmet.pt --source path/to/images --save-txt --save-conf
6.ffmpeg 视频抽帧
#每个180个关键帧取出一个关键帧
ffmpeg -i .\21水-安全帽.mp4 -vf "select='eq(pict_type,I)*not(mod(n\,180))'" -vsync vfr .\21W\output_%04d.jpg
7. python与python的虚拟环境
#创建项目路径
cd projectDir
#创建虚拟环境
python -m venv yourEnvName
#打开虚拟环境
yourEnvName\Scripts\activate
#安装所需要依赖
python install -r requirements.txt
#推出虚拟环境
deactivate
8.自动标注数据或验证模型
#使用yolov5的detect生成标注数据txt,不包含置信度
python detect.py --weights model1.pt model2.pt --source path/to/images --save-txt
#包含置信度的命令,一般不用
python detect.py --weights model1.pt model2.pt --source path/to/images --save-txt --save-conf
#添加classes.txt后,用labelImg二次编辑
#验证模型的准确性,150为帧数*5,为多少帧检测一次
python detect.py --weights vestAndHelmet.pt --source testVideo/video.mp4 --save-txt --vid-stride 150
9.使用lablestudio修改数据
#安装新的python虚拟环境labelstudio38
python -m venv labelstudio38
#安装labelstudio
pip install label-studio
#启动labelstudio
label-studio start